Localization of Self-Driving Cars
MIT Lincoln Laboratory: May-July, 2015
Global localization for GPS-denied operation, but you can see through the ground
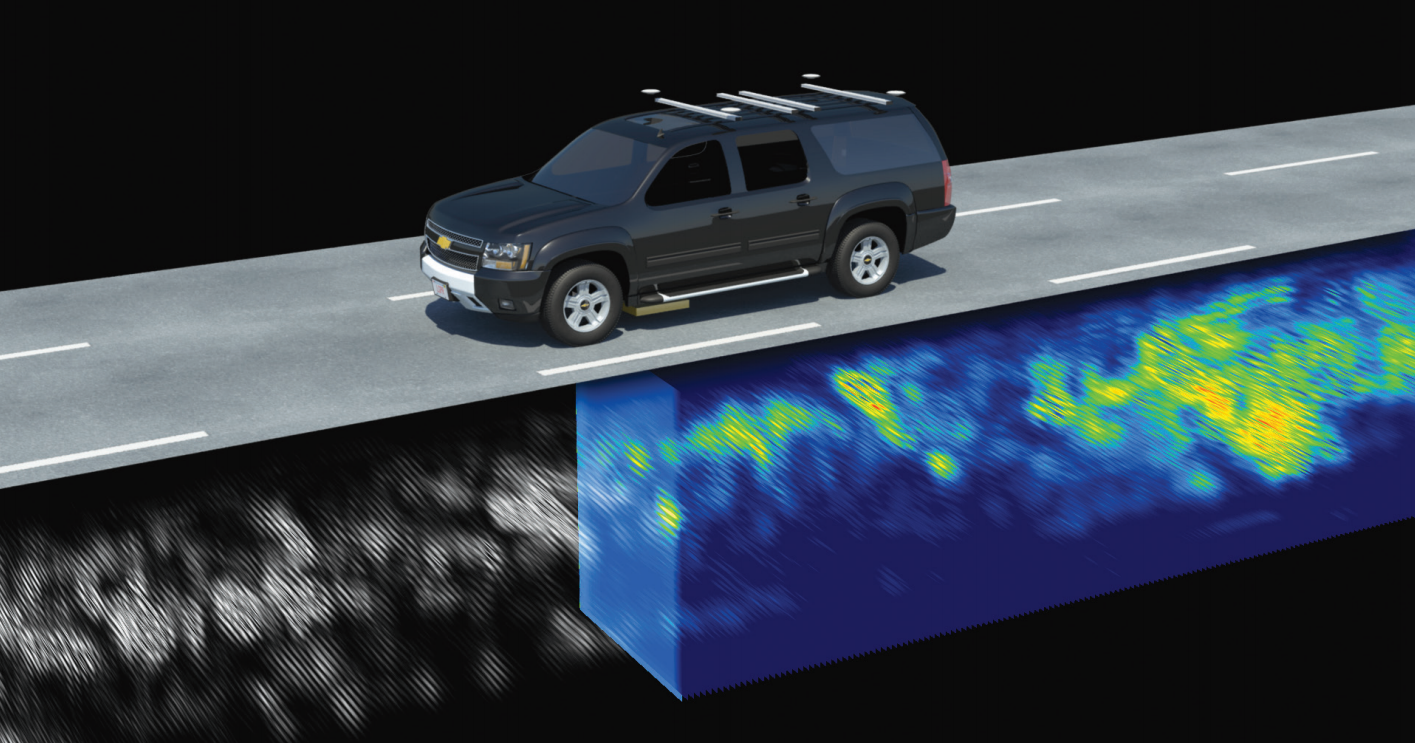
A new sensor was developed at Lincoln Lab called "Localizing Ground Penetrating Radar". In essence, it is a radar array mounted to the underside of a vehicle. As the car drives, the radar maps out the road's subsurface features, capturing man-made objects such as pipes along with rocks and soil densities. The result is a 3D voxel grid of sensor readings along the vehicle's path, approximately as wide as the vehicle itself and 2-3 meters deep. Once the map is built, it can later be used to localize the car with amazing accuracy even at highway speeds.
While the lab had achieved excellent results in localization, the existing method depended on GPS for the initial fix. My work involved developing an algorithm for performing localization in GPS-denied environments where an initial fix was not possible. Using subsurface feature-detection, efficient map representations, and IMU-based estimation of the car's motion, I was able to localize a series of ground scans across an large-scale map from just a few seconds of data. I also demonstrated that my method could be run in real-time to achieve a unique fix within the first few seconds of the car's motion.