I'm Sam Khalandovsky, a robotics engineering lead at Shield AI working on intelligent behaviors for autonomous quadcopters.
Currently I lead the team working on global motion planning, task planning, and exploration on autonomous quadcopters. I'm interested in multi-agent systems, control theory, and generally all things robotics. I've worked on low-level controls, high-level behavioral planning, and a lot in between. On the academic side I've developed algorithms for dynamic bipedal walking, and in industry I've worked on many parts of the stack for self-driving cars and UAVs.
When I'm not working on robotics-related projects, I enjoy rock-climbing, mountaineering, and paragliding.
This old website features some of my projects from college and earlier.

Robotics Projects
Below is a mix of various robotics work that I've done, including paid work, personal projects, research, and academic projects.

Bipedal Walking
Localization of Self-Driving Cars

Frontier Exploration
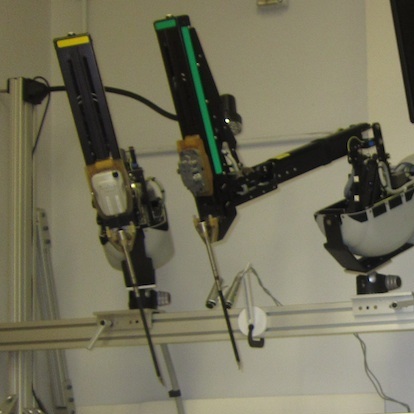
Virtual Fixtures for Assisted Robotic Surgery
Automated Production Line

Grasping via Handle Detection

SLAM on the Neato robot
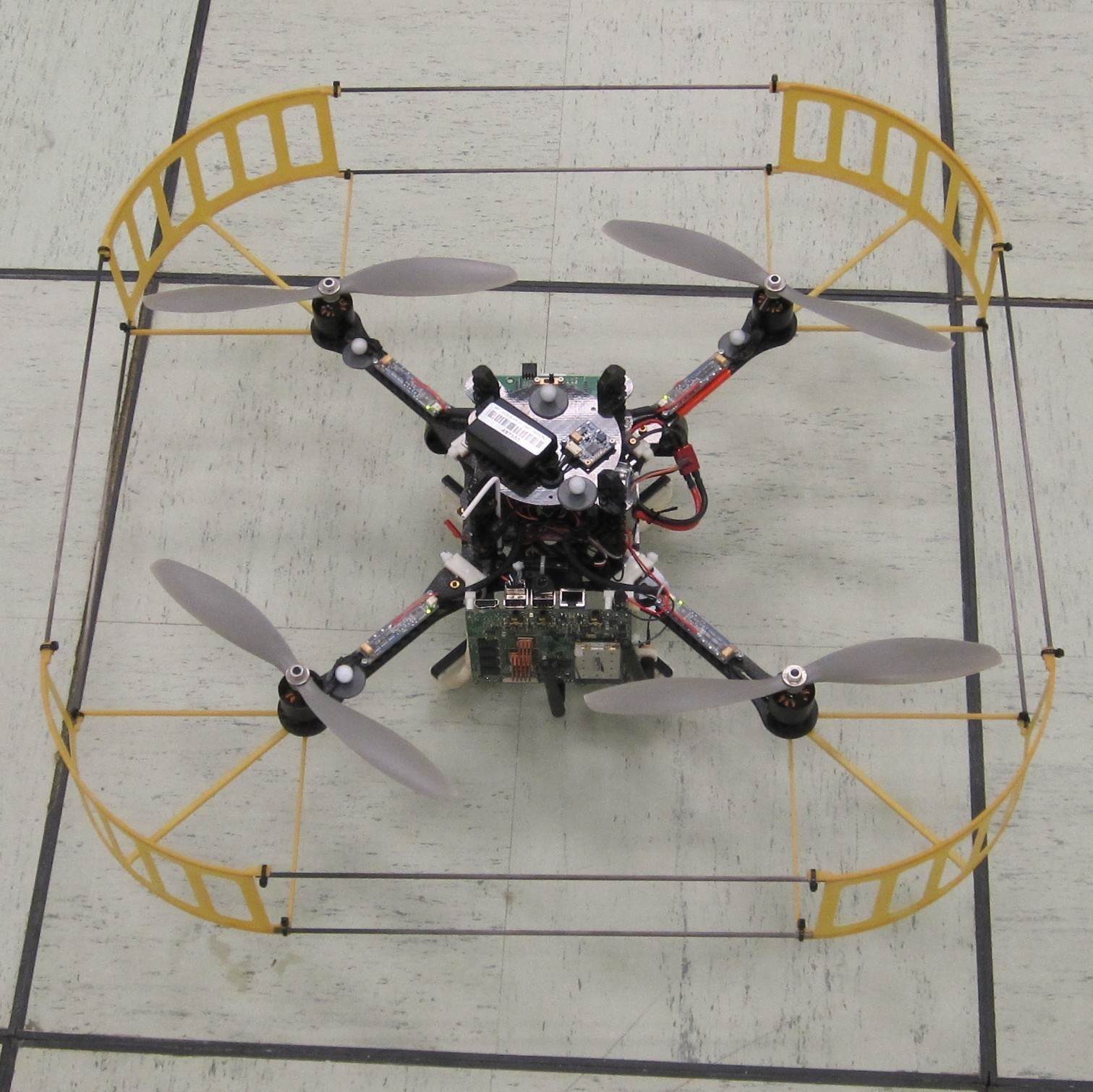
Autonomous Quadrotor Localization

LandShark GPS-INS navigation

Packbot LIDAR navigation
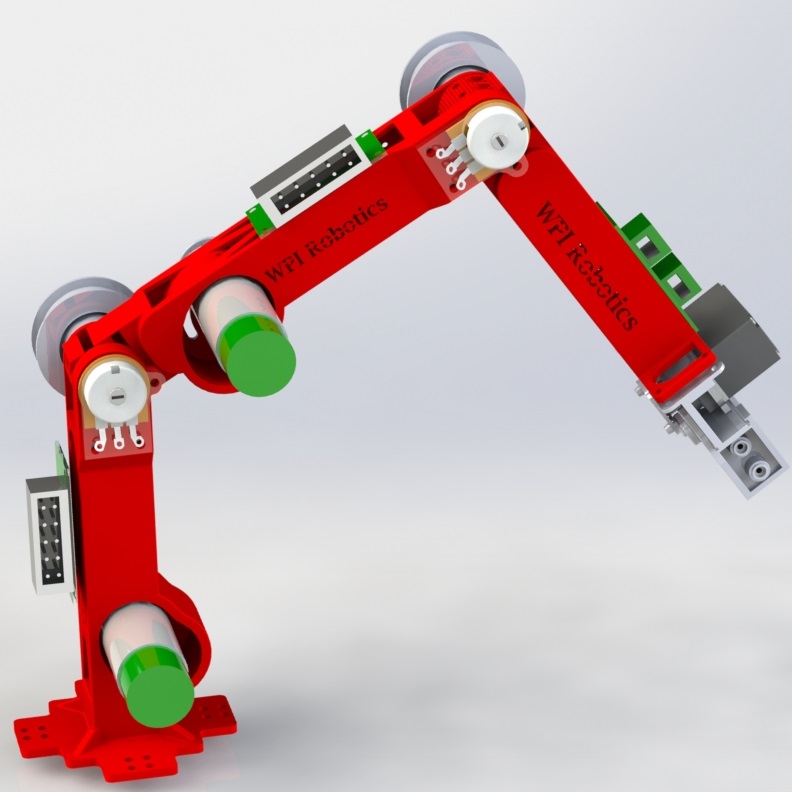
Force Control with Series-Elastic Actuators

DARPA Robotics Challenge

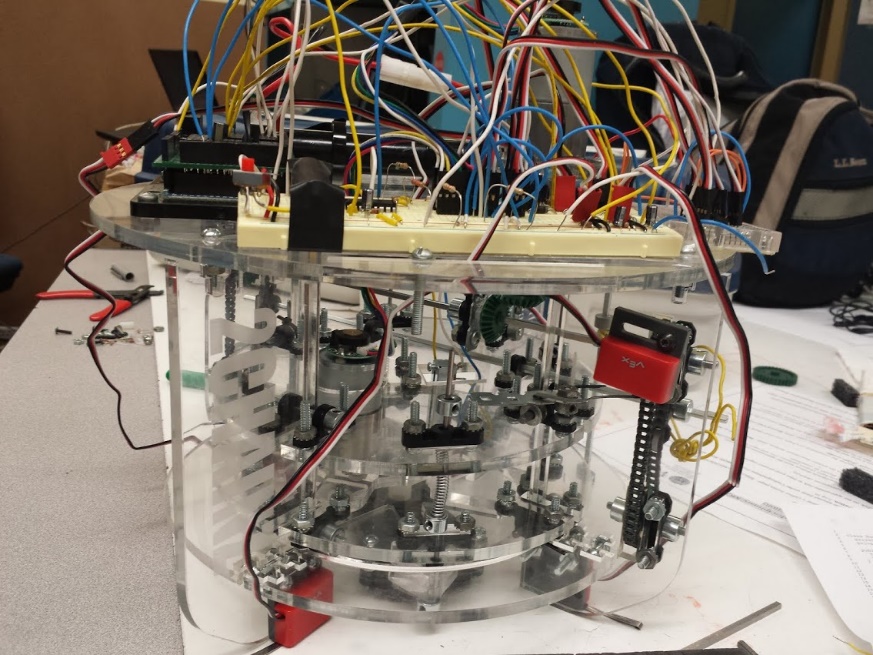
Mock Reactor Maintenance Robot
Soft Robotic Gripper