Autonomous Quadrotor Localization
MIT Lincoln Laboratory: July, 2014
One way to solve the global localization problem for quadrotors is to give them a mobile ground vehicle to track
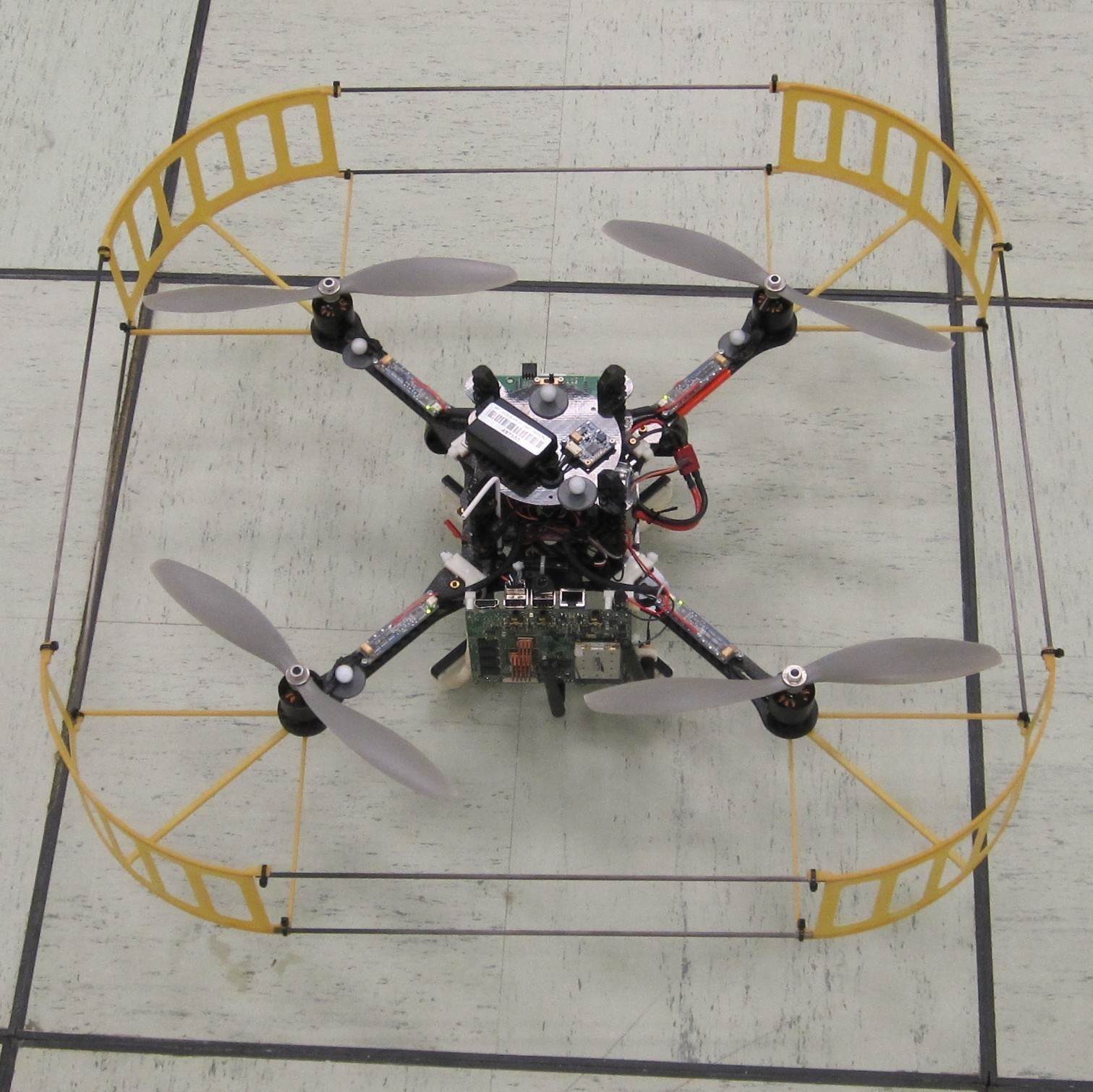
The idea behind this project was to allow an autonomous quadrotor to localize itself without GPS, instead using it's camera to track a collaborating ground vehicle. Doing this also has the added advantage of being to very accurately track relative position to the vehicle, allowing difficult maneuvers such as landing on it for recharging. Furthermore, it means that the quadcopter can utilize the powerful INS on the ground vehicle, instead of relying on it's own, weaker INS. I used the Asctec Pelican quadrotor, a beefy platform with an onboard RGBD Kinect-type camera, and a Packbot bomb-disposal robot to test this idea. By attaching an AR tag to the top of the robot, I was able develop a system for the Pelican to keep the tag within it's field of vision while flying and use the RGBD camera to determine its relative position.