Automated Production Line
WPI, Project for Robot Manipulation: January-March, 2015
Project: program a robot arm to sort blocks on a conveyor belt
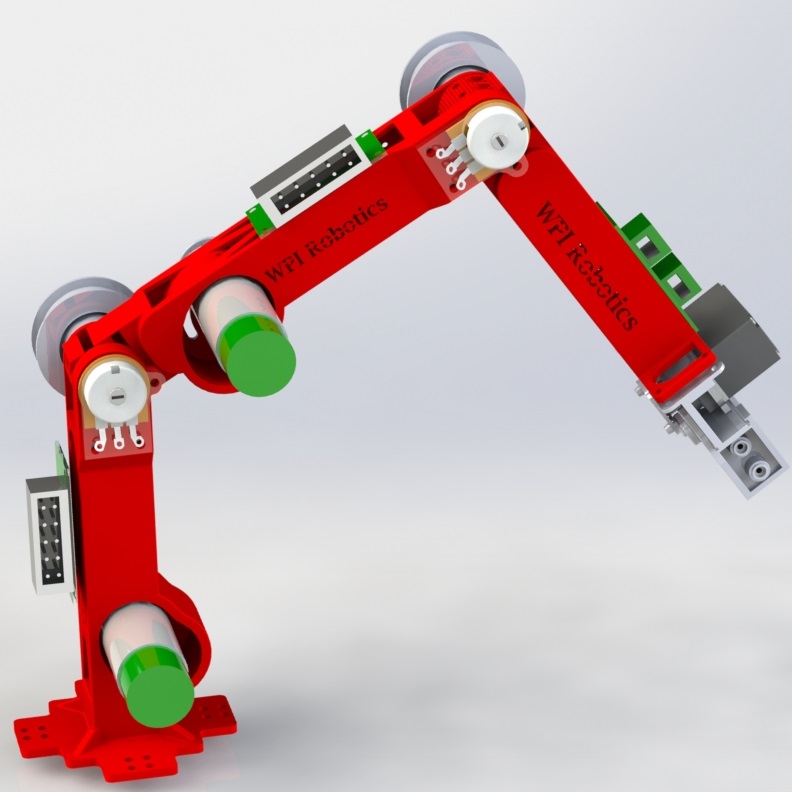
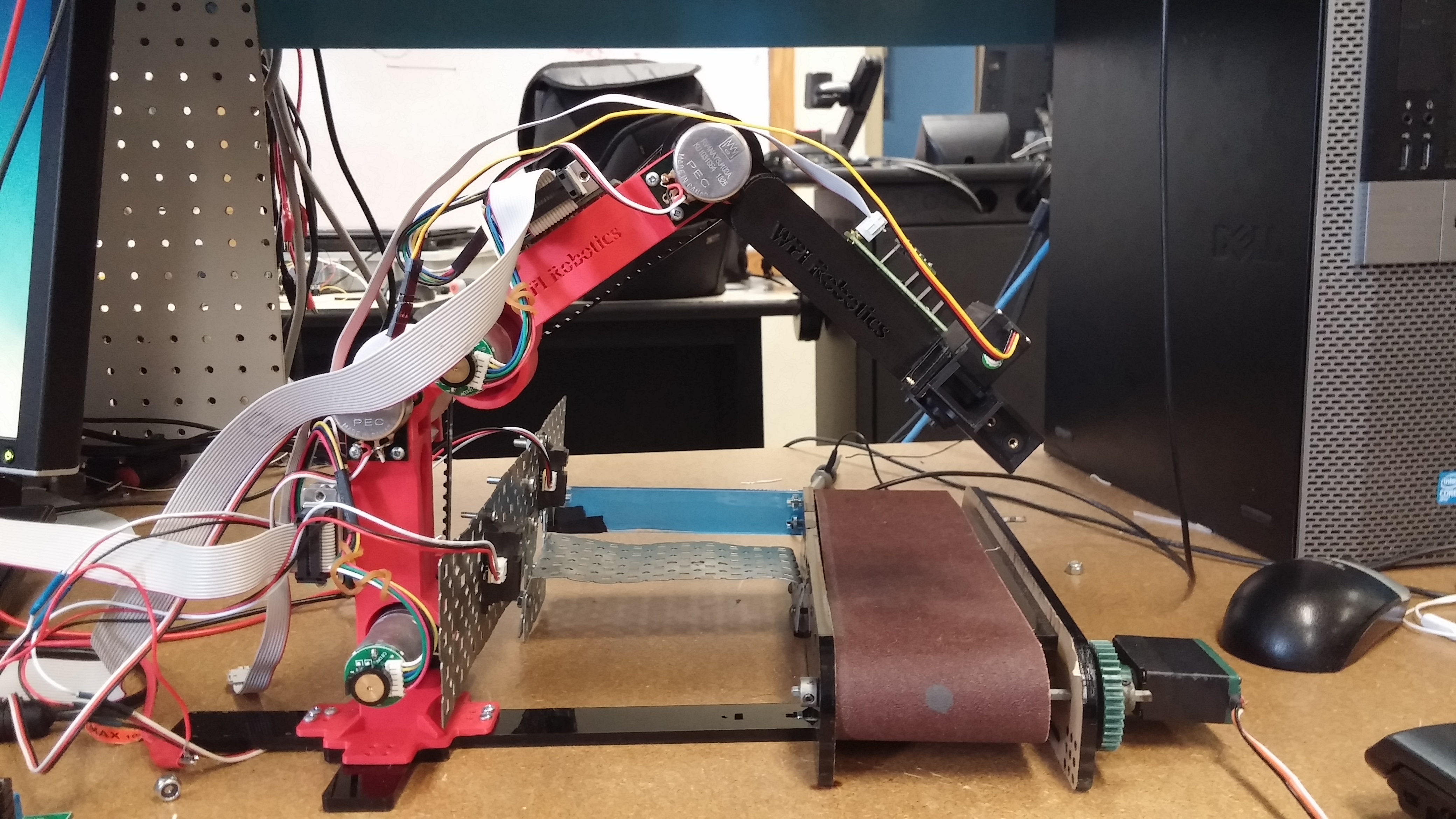
The arm is made of 3D-printed plastic and a couple of Pololu motors, with potentiometers and encoders for joint angle feedback and a standard gripper assembly for picking up blocks. The blocks move past the arm on a conveyor belt and are detected with a pair of IR sensors. The robot arm judges the block's speed, grabs it as it passes, and weighs it by looking at the arm's step-response for a predefined motion. Depending on the detected weight, the block is then sorted into different areas.
The robot autonomous motion was programmed in C++, with a MATLAB interface. The interface plotted data from the arm in real-time, drew a live stick-model of the robot, and allowed clicking locations in the workspace to command the robot arm to go there.