Soft Robotic Gripper
WPI Autonomous Robotics Collaboration (ARC) Lab: October-December, 2013
Developing models and simulations for a novel pneumatic gripper
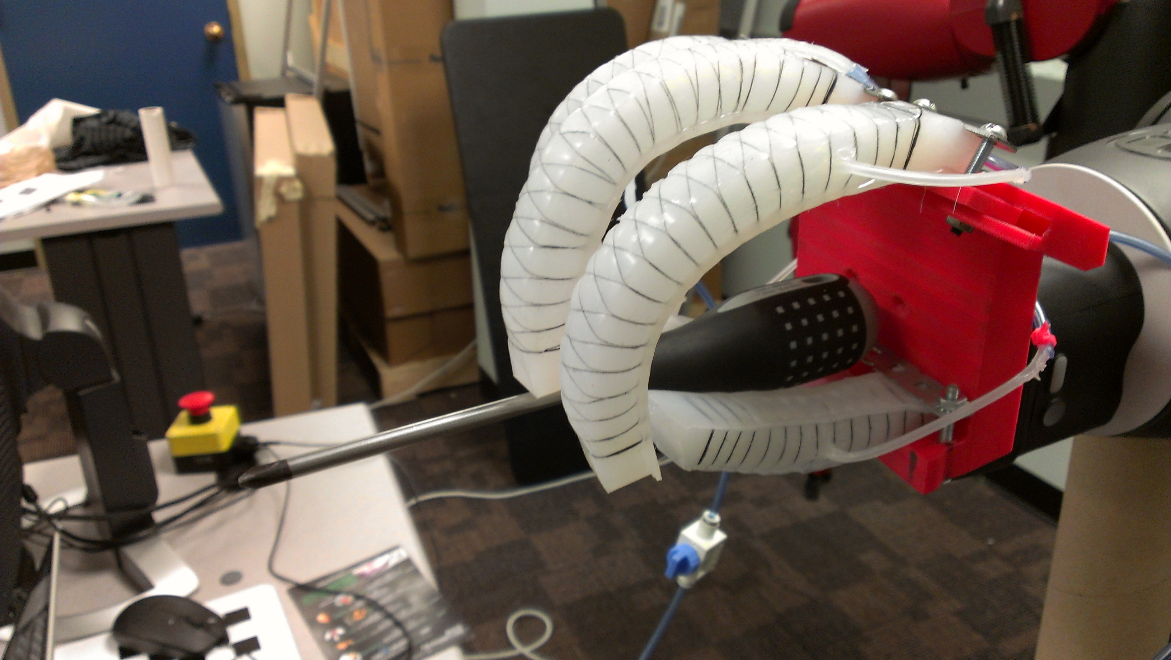
At Dmitry Berenson's ARC Lab, I worked on developing a better model of their soft pneumatic gripper to aid in the development of grasping algorithms. The hand was made of five silicone fingers which bent in a specific direction when the interior air cavity was pressurized. My work was in characterizing the fingers' response to pressure (via processing images of the fingers in MATLAB) and extending the VoxCAD engine to be used as a testbed for grasping algorithms.